Loading...
Organizing Committee
University of Illinois at Urbana-Champaign (UIUC)
Queen Mary, University of London
University of Pennsylvania
UC Davis
Smith College
Abstract
This workshop will bring together researchers interested in a panoply of unusual configuration spaces, arising in applied fields or in plausible models, to look for similarities or creative tensions between them.
Classical configuration spaces in mechanics are spaces of tuples of material points in Euclidean 3D space, sometimes constrained by the mutual distances or just precluding coincidences of any two particles. The no-k-equal configuration spaces and their generalizations relax the no-coincidence conditions allowing some number (greater than 1) of points to coincide. Linkages and origami (hinged structures) represent another well-established class of configuration spaces. Despite many spectacular results on the topology and geometry of the configuration (or moduli) spaces of such mechanical constructions, many natural questions are hard and remain unanswered. In general, neither the topology (even for generic structures), nor singularities of the configuration spaces are known beyond the simplest examples.
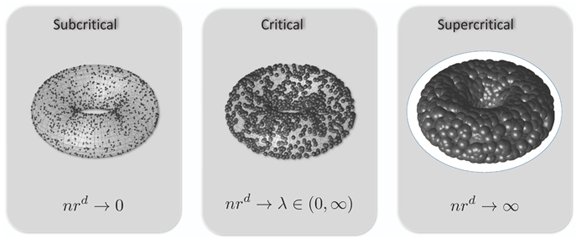
Beyond serial linkages (robot arms), configuration spaces in robotics are the source of many unsolved questions, such as the tantalizing question concerns caging a polygonal 2D shape by a finite collection of pointlike "fingers". Even more exotic are the configuration spaces of hard balls, arising from the archetypal model of statistical physics, Boltzmann gas. Their topology has not been addressed in any detail until very recently, and many basic questions such as the connectivity of the configuration spaces of the hard balls in the "gaseous" regime are unknown.
Along with the mathematical aspects, computational experimentation aspects will be highlighted, as well as applications ranging from path planning algorithms for robots, reconfiguration strategies for origami and protein folding.
Classical configuration spaces in mechanics are spaces of tuples of material points in Euclidean 3D space, sometimes constrained by the mutual distances or just precluding coincidences of any two particles. The no-k-equal configuration spaces and their generalizations relax the no-coincidence conditions allowing some number (greater than 1) of points to coincide. Linkages and origami (hinged structures) represent another well-established class of configuration spaces. Despite many spectacular results on the topology and geometry of the configuration (or moduli) spaces of such mechanical constructions, many natural questions are hard and remain unanswered. In general, neither the topology (even for generic structures), nor singularities of the configuration spaces are known beyond the simplest examples.
Beyond serial linkages (robot arms), configuration spaces in robotics are the source of many unsolved questions, such as the tantalizing question concerns caging a polygonal 2D shape by a finite collection of pointlike "fingers". Even more exotic are the configuration spaces of hard balls, arising from the archetypal model of statistical physics, Boltzmann gas. Their topology has not been addressed in any detail until very recently, and many basic questions such as the connectivity of the configuration spaces of the hard balls in the "gaseous" regime are unknown.
Along with the mathematical aspects, computational experimentation aspects will be highlighted, as well as applications ranging from path planning algorithms for robots, reconfiguration strategies for origami and protein folding.
Loading...
Loading participant list in background...
Lecture Videos
Victor Alexandrov
Sobolev Institute of Mathematics
September 13, 2016 • 12:00 AM